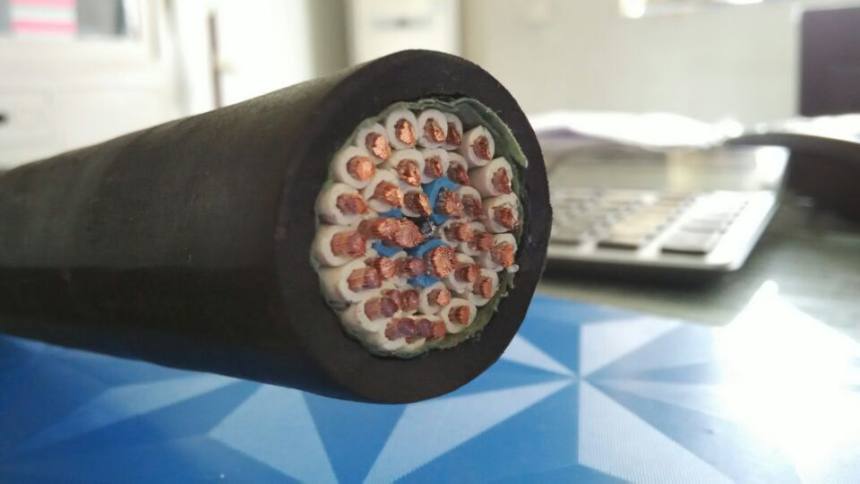
WC5/26-VVP补偿导线图片
WC5/26-VVP补偿导线图片WC5/26-VVP补偿导线仪表测量结果的准确程度不仅与仪表准确度等级有关,而且与其测量范围有关系。所以,适当选用仪表的测量范围,才能达到测量的准确度。如果仪表的测量范围比被测量数值大很多,其测量误差将会很大。,为测量220V的直流电压而选用准确度为1.5级,测量范围为400V的电压表,其测量相对误差为±2.73%;如选用测量范围为600V的电压表,其测量相对误差为±4.1%。仪表的测量范围应与互感器配合,并满足下列要求:应尽量保证电气设备在正常运行时,仪表指示在量程的2/3以上,并考虑过负载运行时,能有适当指示。
ZRC-DJYVPR ZRC-DJYPVR计算机电缆
【简单介绍】
ZRC-DJYVPR ZRC-DJYPVR计算机电缆适用于电子计算机系统、监控回路,发电、冶金、石化等工矿企业,高温场合下集散系统、自动化系统的信号传输及检测仪器、仪表等连接用多对屏蔽电缆。
【详细说明】

图片关键词

一、ZRC-DJYVPR ZRC-DJYPVR计算机电缆执行标准
二、ZRC-DJYVPR ZRC-DJYPVR计算机电缆使用特性
额定电压U0/U:450/750V
工作温度: 一般型不超过70℃
交联聚乙不超过90℃
耐热105℃的不超过105℃
& nbsp; 环境温度: 固定敷设-40℃、非固定敷设-15℃
弯曲半径: 无铠装层电缆应不小于电缆外径的6倍
带铠装层电缆应不小于电缆外径的12倍
三、ZRC-DJYVPR ZRC-DJYPVR计算机电缆型号名称
型号 名称
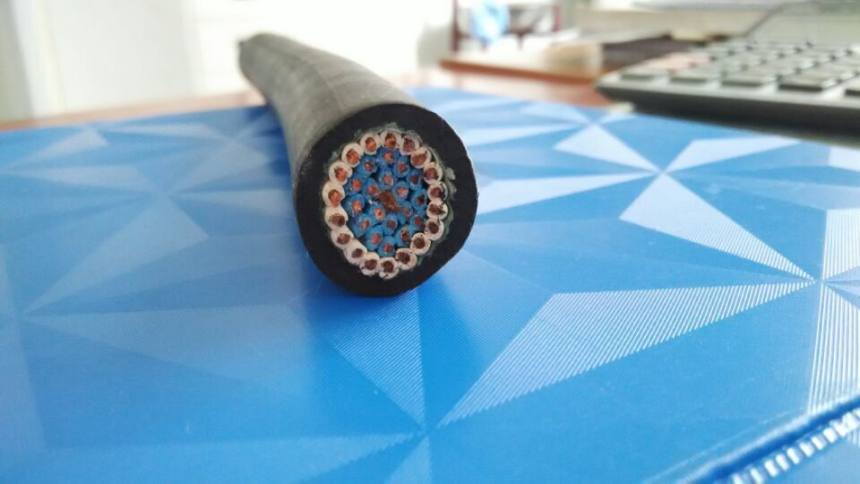
WC5/26-VVP补偿导线图片WC5/26-VVP补偿导线plc是现代工业的基础,虽然它是第二次工业的产物,但是经历了近一个世纪的风风雨雨,它不但没有消失,而且越来越强大,不但工业生产广泛使用,在生活中也应用广泛。很多在工厂从事维修保养的电工朋友,以及刚从学校毕业的想从事自动化行业,PLC是绕不的坎。可苦于没有相关经验,更没有前辈带路,再加上现在大师 满天飞,导致走了很多弯路,今天小编我就从个人工作经验来谈谈这些误区。希望能给大家带来帮助。纠结品牌这是 常见,也是 LOW的问题了,经常在悟空问答上有人如此提问,入门是学习三菱plc还是西门子plc好?我有三菱的基础了,多久能学会西门子PLC?对于此等入门LOW逼问题,我不想再重复,等你纠结好了,估计黄花菜都腐烂了,对此,我只阐述一点,你去学车,去学奔驰呢还是学宝马呢?如果你这个比喻也搞不懂,恕我直言,你也基本看不懂手表了。
聚乙绝缘聚氯乙护套计算机电缆
DJYPV 铜芯聚乙绝缘铜丝编织分屏蔽聚氯乙护套电子计算机电缆
DJYPVP 铜芯聚乙绝缘铜丝编织分屏蔽铜丝编织总屏蔽聚氯乙护套电子计算机电缆
DJYVP 铜芯聚乙绝缘铜丝编织总屏蔽聚氯乙护套电子计算机电缆
DJYP2V 铜芯聚乙绝缘铜带分屏蔽聚氯乙护套电子计算机电缆
DJYP2VP2 铜芯聚乙绝缘铜带分屏蔽及铜带总屏蔽聚氯乙护套电子计算机电缆
DJYVP2 铜芯聚乙绝缘铜带总屏蔽聚氯乙护套电子计算机电缆
DJYP3V 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽聚氯乙护套电子计算机电缆
DJYP3VP3 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽及铝箔/塑料薄膜复合带总屏蔽聚氯乙护套电子计算机电缆
DJYVP3 铜芯聚乙绝缘铝箔/塑料薄膜复合带总屏蔽聚氯乙护套电子计算机电缆
DJYPV22 铜芯聚乙绝缘铜丝编织分屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYPVP22 铜芯聚乙绝缘铜丝编织分屏蔽及铜丝编织总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYVP22 铜芯聚乙绝缘铜丝编织总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYP2VP2-22 铜芯聚乙绝缘铜带总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYVP2-22 铜芯聚乙绝缘铜带分屏蔽及铜带总屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYP3V22 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽钢带铠装聚氯乙护套电子计算机电缆
DJYP3VP3-22 铜芯聚乙绝缘铝箔/塑料薄膜复合带分屏蔽及铝箔/塑料薄膜复合带总屏蔽钢带铠装聚氯乙护套电子计算机电缆
WC5/26-VVP补偿导线图片WC5/26-VVP补偿导线步进电机的线圈通直流电时,带负载转子的电磁转矩(与负载转矩平衡而产生的恢复电磁转矩称为静态转矩或静止转矩)与转子功率角的关系称为角度-静止转矩特性,这就是电机的静态特性。如下图所示:因为转子为永磁体,产生的气隙磁密为正弦分布,所以理论上静止转矩曲线为正弦波。此角度-静止转矩特性为步进电机产生电磁转矩能力的重要指标,转矩越大越好,转矩波形越接近正弦越好。实际上磁极下存在齿槽转矩,使转矩发生畸变,如两相电机的齿槽转矩为静止转矩角度周期的4倍谐波,加在正弦的静止转矩上,则上图所示的转矩为:TL=TMsin[(θL/θM)π/2]其中TL与TM各表示负载转矩和静止转矩(或称把持转矩),相对应的功率角为θL和θM,此位移角的变化决定了步进电机位置精度。